





Sommario
I droni stanno diventando rapidamente i mezzi di accesso per la raccolta di immagini aeree su richiesta in settori quali l’edilizia, l’agrimensura, le assicurazioni e le estrazioni minerarie.
La fotogrammetria ci permette di digitalizzare il mondo fisico e di utilizzare questi dati per risolvere alcune delle sfide più difficili di oggi. Nel processo, elimina la necessità di acquisire manualmente i dati in aree pericolose come i luoghi di lavoro industriali, le cave, i tetti e altre strutture elevate.
La fotogrammetria si basa sulle telecamere per misurare oggetti reali e trasformare lo spazio 3D in mappe 2D. Ciò richiede al software di fotogrammetria di identificare la posizione, l’orientamento e il movimento della fotocamera per calcolare la posizione dei punti tridimensionali. Senza una relazione fisica tra la fotocamera e il soggetto in fase di mappatura, è difficile quantificare l’accuratezza dei risultati dei rilevamenti fotogrammetrici. Pertanto, per quantificare correttamente l’errore, i rilevamenti devono essere ancorati a terra attraverso valori noti.
Le telecamere sono dispositivi fisici che introducono errori nel processo di acquisizione dati. L’immagine 2D di una telecamera non è una vera rappresentazione del mondo fisico. Questo perché i corpi e le lenti della fotocamera non possono essere fabbricati in modo perfetto, e creano errori, come linee distorte in un fotogramma, che il software di fotogrammetria deve essere in grado di compensare.
Questi errori, anche se compensati, possono creare imprecisioni nelle misurazioni lineari effettuate su una mappa elaborata.
In questo studio DroneDeploy ha indagato sui modi per migliorare l’accuratezza della mappatura e mettere insieme un set di pratiche migliori da utilizzare per effettuare misure lineari. Per testare l’accuratezza delle misurazioni effettuate utilizzando mappe generate da dati acquisiti con piattaforme standard industriali di droni DJI, DroneDeploy ha istituito un sistema di controllo al suolo sul tetto del suo ufficio. Quindi sono stati registrati più di 80 voli, ciascuno dei quali con diverse altitudini di volo, telecamere e impostazioni di sovrapposizione delle immagini. Le immagini raccolte sono state quindi elaborate nel cloud, utilizzando il motore di mappatura DroneDeploy.
I set di dati sono stati analizzati e utilizzati per calcolare il margine medio di errore per le misurazioni delle lunghezze di controllo note. Utilizzando i risultati, DroneDeploy ha determinato che utilizzando una telecamera performante e volando a bassa quota con un’elevata sovrapposizione di immagini si producono mappe con la migliore precisione di misurazione lineare.
Modelli di drone utilizzati in questo studio
I modelli di drone DJI scelti per questo studio includono i modelli Mavic Pro, Phantom 3 Pro (P3P), Phantom 4 Pro (P4P), Inspire 1 (con fotocamera DJI Zenmuse X3), Inspire 1 Pro (con fotocamera DJI Zenmuse X5) e Inspire 2 con la fotocamera DJI Zenmuse X4s). Gli altri modelli di DJI Phantom 3 e DJI Phantom 4 sono stati esclusi perché questi modelli condividono lo stesso sensore di fotocamera da 12 megapixel incluso nel Phantom 3 Pro.
DroneDeploy ha scelto di condurre questo studio con i droni DJI perché sono le piattaforme numero uno con telecamere e hardware utilizzati dai professionisti del settore del drone industriale. Poiché questi droni sono la scelta primaria dei clienti DroneDeploy in vari settori, tra cui l’edilizia, l’agricoltura, l’agronometria, l’analisi e l’estrazione mineraria, questi set di dati soddisfano una più ampia gamma di clienti a seconda della loro soluzione hardware scelta.
Sensori della fotocamera
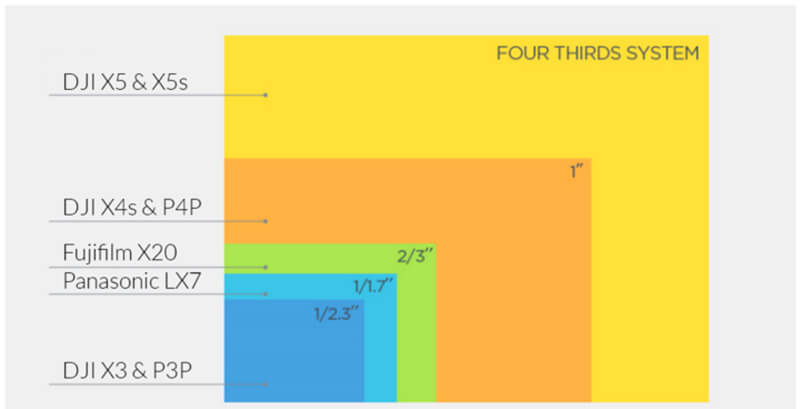
Sono stati utilizzati diversi sensori per raccogliere dati in questo studio che vanno da 12MP, 1/2.3″ a 20MP, 1″. Questa selezione rappresenta la gamma completa delle fotocamere DJI disponibili oggi sul mercato e comprende otturatori sia meccanici che elettronici. Le dimensioni dei sensori possono essere trovati in Figura 1
Premesse
Deviazione standard delle misure lineari nella fotogrammetria
I dati pubblicamente disponibili relativi alla deviazione standard delle misurazioni lineari dai modelli di fotogrammetria sono limitati. Gli studi esistenti in genere riguardano l’accuratezza dei volumi e non includono dati specifici per le misurazioni lineari, da punto a punto. Ciò rende incredibilmente difficile capire il margine di errore che ci si può aspettare da misurazioni di distanza e di aree.
Inoltre, la ricerca canonica sulla precisione fotogrammetrica si concentra sull’uso dei punti di controllo GCP. Ciò significa che l’esattezza viene misurata come differenza tra la posizione geografica di un punto di controllo registrato con precisione tramite il GPS e la posizione teorica di quel punto di controllo calcolato dal software di fotogrammetria. Questo metodo è stato favorito perché è il modo migliore per isolare le variabili sperimentali e considerato il più scientificamente rigoroso. Tuttavia, poiché l’accuratezza di un punto di controllo può applicarsi solo a un singolo punto dello spazio, questi dati eseguono un lavoro scadente nel valutare l’accuratezza delle misurazioni lineari.
Linee guida per produrre mappe aeree accurate con i droni
Fino ad oggi, ci sono poche risorse che forniscono linee guida per quanto riguarda la cattura e l’elaborazione di dati aerei per uso industriale. Quelli che esistono non forniscono dati per sostenere suggerimenti, lasciando i professionisti delle mappature con scarse prove per guidarli nei metodi di cattura dei dati.
Metodologia
Creazione di un sistema di controllo al suolo
Per testare l’accuratezza delle misure bidimensionali, DroneDeploy ha istituito un sistema di controllo al suolo sul tetto dei suoi uffici di 1045 Bryant Street. Questo è mostrato in Figura 2. Oltre ai punti di controllo al suolo, questo sistema di controllo ha definito le distanze di controllo con lunghezze note. Queste distanze di controllo potrebbero quindi essere confrontate con le misurazioni teoriche effettuate con il software di fotogrammetria.
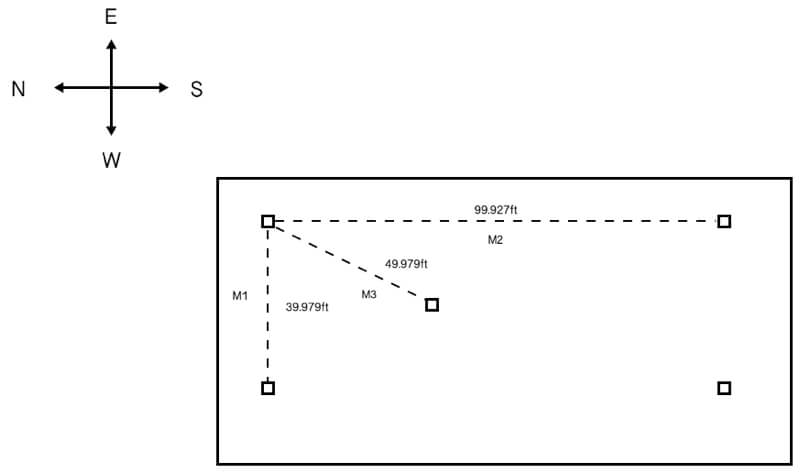
Il sistema di controllo a terra ha utilizzato tre marcatori misurati 1′ x 1′ posizionati in una grande forma a “L” ad angolo retto lungo l’asse primario dell’edificio, con una quarta marcatura aggiunta come una lunghezza che disegna l’asse della “L”. Le distanze di controllo tra ciascun marcatore sono state misurate manualmente usando un nastro metallico e controllate con un misuratore di distanza laser della Leica.
Raccolta di dati aerei
I dati aerei sono stati poi raccolti con più di 80 voli individuali usando i droni DJI e l’applicazione mobile DroneDeploy. Un totale di 4 voli sono stati effettuati a 66 piedi, 100 piedi, 200 piedi e 400 piedi sopra la superficie del tetto usando ogni modello di drone DJI e poi trattati in modo identico con il motore di mappatura DroneDeploy. Le variazioni leggere dell’illuminazione, del percorso di volo e dell’altitudine sono state incluse per simulare la variazione del mondo reale nei dati di mappatura raccolti.
Cattura dei dati del punto di controllo al suolo
Per raccogliere i dati del punto di controllo al suolo, sul tetto sono stati collocati 5 target aggiuntivi di 3″ x 3″. Le posizioni geografiche del centro di questi obiettivi più grandi sono stati quindi registrati con un Reel Emlid RS e Trimble Catalyst. Questi ricevitori GNSS (Global Navigation Satellite System) possono essere visualizzati nelle figure 3 e 4.
Si può vedere una mappa aerea elaborata della configurazione del sistema di controllo al suolo in Figura 5.
Una volta installata la stazione a terra, è stato utilizzato un DJI Phantom 4 Pro per mappare ancora una volta il tetto alle altezze di 66 piedi, 100 piedi, 200 piedi e 400 piedi.
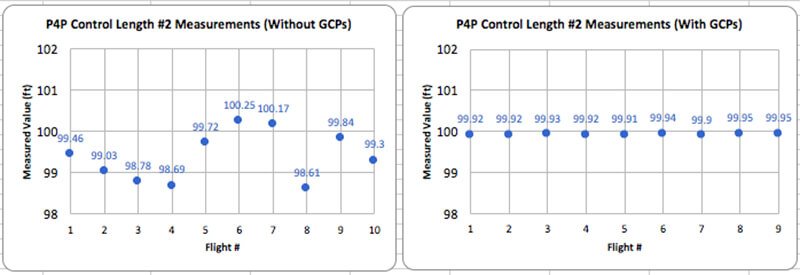
Per meglio comprendere la deviazione standard e il margine medio di errore, un campione statistico è stato preso utilizzando il Phantom 4 Pro. Volando missioni pianificate identiche con GCP ad un’altitudine di 66 piedi, sono stati completati 6 voli. Allo stesso modo, un set di dati finale è stato creato senza GCP volando il Phantom 4 Pro a 66 ft per altre 10 volte. Questo metodo è stato adottato per approssimare la variazione presente nella precisione di misurazione lineare quando si associa una posizione alle stesse condizioni.



Risultati chiave
In media, le misurazioni lineari sono esatte entro l’1,1%
Quando si confrontano i dati raccolti in tutti i modelli di droni DJI inclusi nello studio, il margine medio di errore per tutti i voli è stato pari a 1,1%. Questo significa che il valore dell’errore di misura medio è stato dell’1,1% del valore della lunghezza del controllo.
Così, quando si misura una lunghezza di 100 piedi, l’errore medio sarebbe di 1,25 piedi.
Fotocamere ad alta risoluzione riducono l’errore medio di misurazione dello 0,33%
I dati mostrano una chiara correlazione tra immagini a risoluzione superiore e mappe altamente accurate. Ad esempio, le mappe prodotte con la fotocamera P3P da 12MP hanno prodotto un margine di errore medio di 0,72 piedi durante le misurazioni, mentre le mappe prodotte con la fotocamera da 20MP del P4P, hanno prodotto un margine di errore medio di 0,46 piedi. Comparando il margine di errore per ogni lunghezza di controllo come percentuale, si è scoperto che l’errore medio di misura per la fotocamera da 20MP era 0,33% in meno rispetto alla fotocamera da 12 megapixel. Mentre 0.33% non mi sembra significativo, va ricordato che sarebbe stata una riduzione di errore di 0,33 piedi (circa 4 pollici) per una misura di 100 piedi.
Gli errori medi di misurazione tra le mappe 12MP e le mappe 20MP hanno mostrato che l’errore aumenterebbe proporzionalmente alla risoluzione della fotocamera con un coefficiente di correlazione di 0,33. Tra le mappe da 12MP a 16MP, questo coefficiente di correlazione è stato calcolato a 0,56.
Volando a bassa quota la precisione di misura è migliorata dello 0,35%
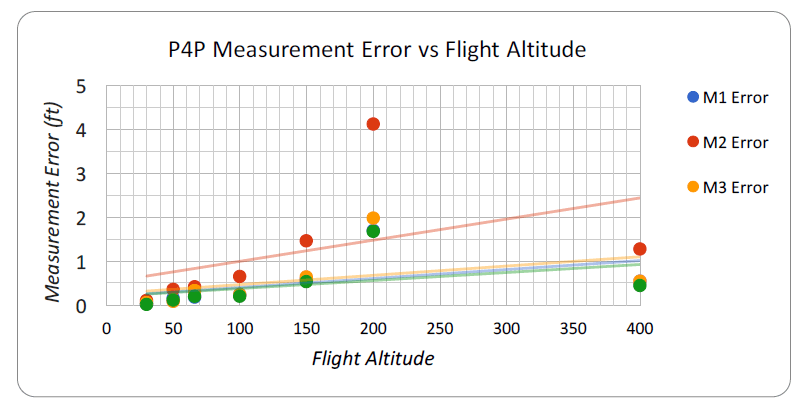
I dati suggeriscono che i piani di volo condotti a quote più basse producono mappe con una precisione più elevata di quelle con voli a elevate altezze. Gli errori medi di misurazione hanno mostrato che l’errore aumenterebbe proporzionalmente all’altitudine di volo con un coefficiente di correlazione media di 0,42. Questa correlazione viene visualizzata di seguito in Figura 1.
C’è stato un miglioramento dello 0,35% in precisione di misura per le mappe a 66 piedi di altezza rispetto a quelli con voli a 100, 200 o 400 piedi di altezza.
Insieme, risoluzione della fotocamera e Altitudine dimezzato l’errore medio di misurazione
Quando si vola a quote più basse e con una fotocamera ad alta risoluzione, il margine medio di errore è stato ridotto allo 0,64%. Questo è quasi la metà del margine medio di errore per tutti i droni a tutte le altitudini.
Visualizzazione della risoluzione della mappa per Altitudine
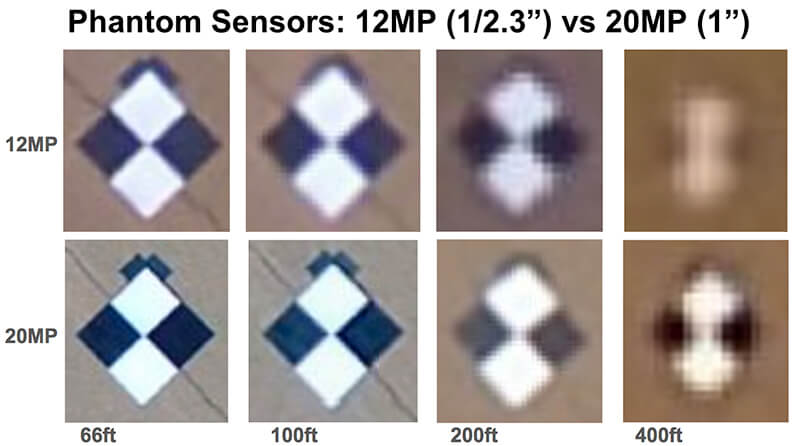
C’è stata una differenza significativa nella risoluzione della mappa quando si vola a quote più alte. Questo effetto di altitudine sulla risoluzione della mappa ha reso difficile contrassegnare il centro di ogni punto di controllo al suolo quando si elaborano i dati della mappa in DroneDeploy. Per un esempio dell’effeto dell’altitudine sulla risoluzione dell’immagine, vedere la Figura 7.
Punti di controllo a terra migliorano la precisione di mappatura di 10x
Per tutte le 9 mappe elaborate con GCP, l’errore di misura medio è stato ridotto a 0,4 piedi (0,5 pollici). A differenza delle mappe non GCP, l’errore medio non dipende dalla grandezza della lunghezza di controllo. La lunghezza di controllo di 100 piedi, che ha sempre prodotto il maggior margine di errore misurato sulle mappe non-GCP, è stato il più esatto con un errore medio di 0,01 piedi (0,12 pollici), questi piccoli errori erano anche incredibilmente coerenti e avevano una molto piccola varianza. La deviazione standard media (σ”) degli errori di misura sulle mappe GCP è stata σ” = 0.02, che era 10 volte inferiore rispetto alle mappe non GCP, come mostrato nella Figura 2.
Conclusione
Utilizzare fotocamere ad alta risoluzione per una maggiore precisione di misura
I dati di DroneDeploy indicano che l’utilizzo di una telecamera con almeno 20MP riduce il margine medio di errore nelle misurazioni lineari allo 0,64%. I dati raccolti utilizzando la fotocamera DJI Phantom 4 Pro a 20MP con otturatore meccanico hanno fornito i risultati più accurati dei dati e delle misurazioni rispetto alle fotocamere con risoluzione inferiore come quelle utilizzate dal DJI Mavic Pro o la serie Inspire. DroneDeploy suggerisce ai clienti che cercano di realizzare le mappe più accurate per misurare le distanze punto-punto di utilizzare il DJI Phantom 4 Pro.
Le missioni di volo a bassa quota per una maggiore precisione di misurazione
I dati di DroneDeploy suggeriscono che la creazione di piani di volo con elevazioni più basse possano ridurre significativamente il margine di errore. Le riduzioni esatte dell’errore dipendono dalla fotocamera utilizzata. DroneDeploy raccomanda ai piloti di creare piani di volo che bilanciano le esigenze della missione nei confronti delle impostazioni di volo. Volare più basso, con sovrapposizione più elevata, se si vogliono effettuare accurate misurazioni lineari utilizzando la mappa ortomosaica dronegenerata. Ciò comporta naturalmente un carico utile di immagine più grande da elaborare all’interno del motore di mappatura DroneDeploy. Questo aumento delle immagini avrà anche un aumento sul tempo di caricamento e di elaborazione.
Punti di controllo a terra producono i risultati più coerenti e precisi
Lo studio di DroneDeploy dimostra che ci possono essere una vasta gamma di errori presenti nei set di dati raccolti utilizzando modelli di drone e telecamere DJI. Il margine medio di errore di misurazione lineare senza l’utilizzo di punti di controllo al suolo è stato dell’1,1% della lunghezza del controllo, tuttavia i singoli valori di errore sono caduti ovunque nell’intervallo da 0,01 a 6,99 piedi. Se un progetto richiede tassi di accuratezza altamente coerenti, o dovrebbero essere fatte determinazioni mission-critical dal set di dati, allora i punti di controllo al suolo devono essere utilizzati. Questo studio ha scoperto che l’elaborazione con i punti di controllo al suolo ha ridotto l’errore medio di misura a 0,5 pollici, un miglioramento di quasi 10 volte, per tutte le lunghezze di controllo. Gli errori di misura per le mappe GCP hanno anche mostrato una riduzione simile di 10x nella deviazione standard dell’errore, il che significa non solo che i dati GCP sono più accurati, ma sono più coerenti e affidabili per applicazioni che richiedono maggiore precisione.
L’altitudine conta quando si fa una mappatura con i punti di controllo al suolo
Come accennato in precedenza, la risoluzione dell’immagine sarà influenzata dall’altitudine. Questo renderà difficile contrassegnare il centro del punto di controllo a terra durante l’elaborazione della mappa in DroneDeploy. L’accuratezza non importa se non si è in grado di identificare con precisione il centro del vostro obiettivo. I piloti dovrebbero essere sicuri di prendere in considerazione e di adeguare l’altitudine di volo per ottenere una risoluzione desiderata che permetterà loro di identificare correttamente e con sicurezza l’obiettivo GCP all’interno della loro mappa elaborata del drone.